
About This File
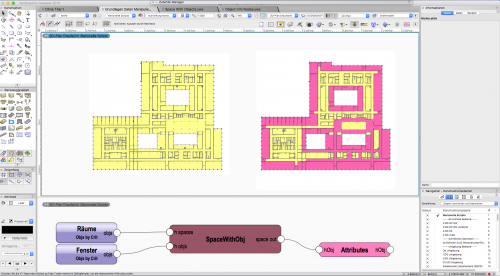
This node sorts out all spaces which have a collision with one of the input objects. Can be used to detect, if a space contains a specific object.
For collision points, the space polygon and the object's bounding box is used. There is a OIP dim parameter for tolerance value.
The vwx contains a quick and dirty test floor plan, nothing real 🙂
